
Page 26 - Robótica - 6ºano - Escola Secundária da Sé
P. 26
ROBÓTICA INDUSTRIAL
Robô industrial, como oficialmente definido pela ISO, é um "manipulador multipropósito
controlado automaticamente, reprogramável, programável em três ou mais eixos". O
campo da robótica industrial pode ser definido como o estudo, desenvolvimento e uso
de sistemas automáticos para a manufatura (uma definição de alto-nível baseada na
definição da International Robotics Federation - IFR).
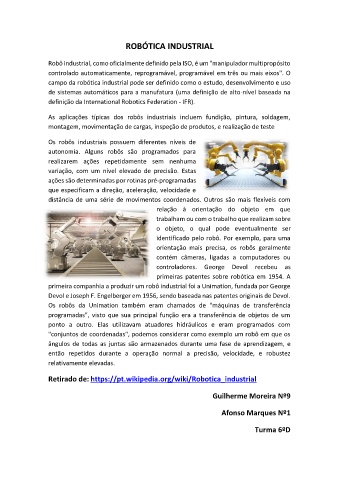
As aplicações típicas dos robôs industriais incluem fundição, pintura, soldagem,
montagem, movimentação de cargas, inspeção de produtos, e realização de teste
Os robôs industriais possuem diferentes níveis de
autonomia. Alguns robôs são programados para
realizarem ações repetidamente sem nenhuma
variação, com um nível elevado de precisão. Estas
ações são determinadas por rotinas pré-programadas
que especificam a direção, aceleração, velocidade e
distância de uma série de movimentos coordenados. Outros são mais flexíveis com
relação à orientação do objeto em que
trabalham ou com o trabalho que realizam sobre
o objeto, o qual pode eventualmente ser
identificado pelo robô. Por exemplo, para uma
orientação mais precisa, os robôs geralmente
contém câmeras, ligadas a computadores ou
controladores. George Devol recebeu as
primeiras patentes sobre robótica em 1954. A
primeira companhia a produzir um robô industrial foi a Unimation, fundada por George
Devol e Joseph F. Engelberger em 1956, sendo baseada nas patentes originais de Devol.
Os robôs da Unimation também eram chamados de "máquinas de transferência
programadas", visto que sua principal função era a transferência de objetos de um
ponto a outro. Elas utilizavam atuadores hidráulicos e eram programados com
"conjuntos de coordenadas", podemos considerar como exemplo um robô em que os
ângulos de todas as juntas são armazenados durante uma fase de aprendizagem, e
então repetidos durante a operação normal a precisão, velocidade, e robustez
relativamente elevadas.
Retirado de: https://pt.wikipedia.org/wiki/Robotica_industrial
Guilherme Moreira Nº9
Afonso Marques Nº1
Turma 6ºD