
Page 236 - Robot Design Handbook ROBOCON Malaysia 2019
P. 236
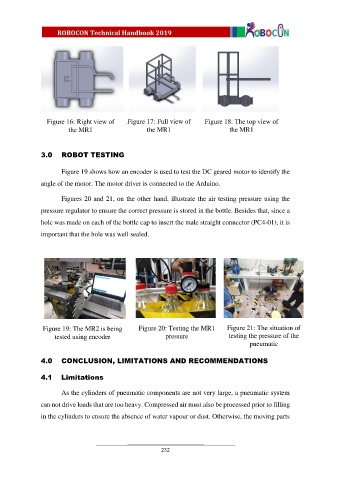
Figure 16: Right view of Figure 17: Full view of Figure 18: The top view of
the MR1 the MR1 the MR1
3.0 ROBOT TESTING
Figure 19 shows how an encoder is used to test the DC geared motor to identify the
angle of the motor. The motor driver is connected to the Arduino.
Figures 20 and 21, on the other hand, illustrate the air testing pressure using the
pressure regulator to ensure the correct pressure is stored in the bottle. Besides that, since a
hole was made on each of the bottle cap to insert the male straight connector (PC4-01), it is
important that the hole was well sealed.
. Figure 19: The MR2 is being Figure 20: Testing the MR1 Figure 21: The situation of
tested using encoder pressure testing the pressure of the
pneumatic
4.0 CONCLUSION, LIMITATIONS AND RECOMMENDATIONS
4.1 Limitations
As the cylinders of pneumatic components are not very large, a pneumatic system
can not drive loads that are too heavy. Compressed air must also be processed prior to filling
in the cylinders to ensure the absence of water vapour or dust. Otherwise, the moving parts
232