
Page 240 - Robot Design Handbook ROBOCON Malaysia 2019
P. 240
The other mechanical design component of the MR1 is the pneumatic hand. This
pneumatic hand is used to pick-up the Shagai and put it on the launcher. The pneumatic
hand is made of steel. The pneumatic hand is also designed to move 180 degree to pick-up
the Shagai. To power up this pneumatic hand, it uses a motor with a battery ranging between
7.4 V and 12 V. By using this range of voltage, it can pick-up the Shagai to the launcher
without any error to the robot nor damaging the Shagai. The MR1 also has a special feature
that allows the Shagai to land in the Landing Zone.
The special feature is the pressure powered launcher. This kind of launcher uses
solenoid cylinder shaped as the main part of the launcher. It uses air pressure to launch the
Shagai into the Landing Zone. This method ensures that the Shagai to land in the Landing
Zone perfectly and precisely. This solenoid uses 5 Pa to create a power that pushes the
Shagai into the Landing Zone.
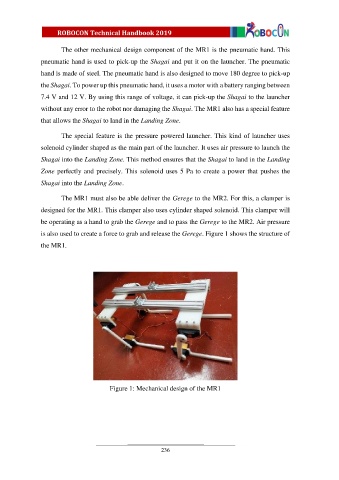
The MR1 must also be able deliver the Gerege to the MR2. For this, a clamper is
designed for the MR1. This clamper also uses cylinder shaped solenoid. This clamper will
be operating as a hand to grab the Gerege and to pass the Gerege to the MR2. Air pressure
is also used to create a force to grab and release the Gerege. Figure 1 shows the structure of
the MR1.
Figure 1: Mechanical design of the MR1
236