
Page 262 - Robot Design Handbook ROBOCON Malaysia 2019
P. 262
to shoot the Shagai. The servo-controlled gripper is mounted on one side of the base so that
it can pass the Gerege to the MR2 easily.
2.1.2 Mechanical Design for the MR2
The MR2 is a four-legged robot. The frame of the MR2 is rectangular as to imitate
the body shape of an animal. Initially, the MR2 is designed such that the servo motors are
used to actuate itself. However, we found out that the torque supplied is not sufficient
enough and there is little gap between the servo arm to the gear head, causing a very fragile
motion. We then decided to use the power window motor as it provides more torque. Long
screws are used to act as joints. The motion of the legged robot is then relied on the rotation
of these joints. The pedal is designed to have large contact surface area to avoid any slipping.
Rubber is used to provide better grip to the ground. This pedal is made flexible because we
want the legs to step on uneven ground, including to step on an inclined angle. Rubber is
used to tie the pedal to the legs so that the pedal could be twisted when it lands on the
ground.
2.2 Electronic Design
2.2.1 Electronic Design for the MR1
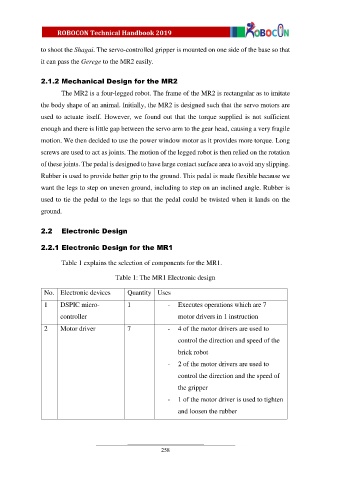
Table 1 explains the selection of components for the MR1.
Table 1: The MR1 Electronic design
No. Electronic devices Quantity Uses
1 DSPIC micro- 1 - Executes operations which are 7
controller motor drivers in 1 instruction
2 Motor driver 7 - 4 of the motor drivers are used to
control the direction and speed of the
brick robot
- 2 of the motor drivers are used to
control the direction and the speed of
the gripper
- 1 of the motor driver is used to tighten
and loosen the rubber
258