
Page 17 - เอกสารหลักสูตรสรรพาวุธเบื้องต้น วิชาระบบการรบและระบบเครื่องควบคุมการยิงแบบเรดาร์
P. 17
๒.๔ แนวเส้นอ้างอิง และค่า Ballistic ที่เกี่ยวข้องในการค านวณของคอมพิวเตอร์
เมื่อก าหนดตาแหน่ง (Coordinate) ของเปูาจากระบบ Sensor ซึ่งถูกวัดในรูปของ แบริ่ง (Bearing) มุม
ุ
ทางกระดก (Elevation) และระยะเปูา (Range) เป็นเสน Line Of Sight (LOS) นั้น คอมพิวเตอร์ควบคมการยิง จะ
้
้
ี่
้
ุ
ด าเนินการค านวณมุมดักหน้าของเปูามีอยู่สองมุม(มุมกระดกและมุมหัน) เพื่อทใชควบคมปืนให้สามารถยิงไดถูกเปูาท ี่
ี่
ั
้
็
ี่
ก าลังเคลื่อนที่ ซึ่งมีลักษณะเหมือนกับนายพรานทเลงปืนของตนไปยังนกทก าลงบินอยู่ เสนแนวเลงยิง Line Of Fire
็
(LOF) จะต้องอยู่ในลักษณะที่ลูกปืนและเปูามาชนกันตรงจดเดยวกันในเวลาเดยวกัน และเรืออยู่ในทองทะเลทมีคลนลม
ี
ื่
้
ี่
ุ
ี
ี่
้
่
่
ั
้
ดงนั้นจะตองมีการแก้คาการโคลง โดยคาทใชแก้อาการโคลงของเรือเป็นแบบ (Roll และ Pitch) และแบบ (Level
ี่
ื่
และ Cross Level) การแก้คาทาง Level จะทาหน้าทแก้การเคลอนทของดาดฟูาเรือ (Deck Plane) ในเสนแนว
้
ี่
่
ติดตามเปูา (Line Of Sight) การแก้ค่าทาง Cross Level ท าหน้าที่แก้การเคลอนทของดาดฟูาเรือ ในแนวตงฉากกับ
ี่
ื่
ั้
เส้นแนวติดตามเปูา ค่าแก้ทั้งสองนี้ ได้จากการหาความสัมพันธ์โดยเทียบกับพื้นระนาบจริง (True Horizontal Plane)
ุ
ั่
ั
คอมพิวเตอร์ก็ให้ผลลพธ์ของปัญหาการควบคมการยิงไดแก่คาสงทางหันและทางกระดกของปืน (Gun Order)
้
ิ
้
่
ี
ี่
์
้
ี่
สัมพันธ์กับ Sensor ซึ่งเป็นอุปกรณทก าหนดเสนแนวตดตามเปูา (Line Of Sight) แตเนื่องจากปืนไม่ไดอยู่ทเดยวกัน
้
ึ
ั
่
กับ Director ดงนั้นจงตองมีการแก้คาระยะห่างระหว่างอุปกรณ (Parallax) และคาอาการเอียงของแทนฐานปืน
่
์
่
(Roller Path Tilt) ด้วย
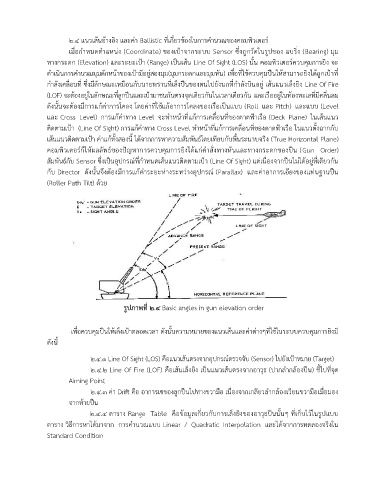
รูปภาพที่ ๒.๔ Basic angles in gun elevation order
เพื่อควบคุมปืนให้เล็งเปูาตลอดเวลา ดังนั้นความหมายของแนวเส้นและค่าต่างๆที่ใช้ในระบบควบคมการยิงมี
ุ
ดังนี้
๒.๔.๑ Line Of Sight (LOS) คือแนวเส้นตรงจากอุปกรณ์ตรวจจับ (Sensor) ไปยังเปูาหมาย (Target)
ุ
้
้
๒.๔.๒ Line Of Fire (LOF) คอเสนเลงยิง เป็นแนวเสนตรงจากอาวุธ (ปากลากลองปืน) ชไปทจด
ี้
้
ื
ี่
็
Aiming Point
๒.๔.๓ ค่า Drift คือ อาการเซของลูกปืนไปทางขวามือ เนื่องจากเกลียวลากลองเวียนขวามือเมื่อมอง
้
จากท้ายปืน
ื
๒.๔.๔ ตาราง Range Table คอข้อมูลเกี่ยวกับการเลงยิงของอาวุธปืนนั้นๆ ทเก็บไว้ในรูปแบบ
็
ี่
ตาราง วิธีการหาไดมาจาก การคานวณแบบ Linear / Quadratic Interpolation และไดจากการทดลองจริงใน
้
้
Standard Condition