
Page 314 - Robot Design Handbook ROBOCON Malaysia 2019
P. 314
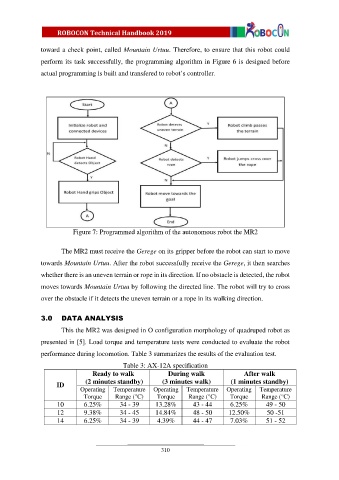
toward a check point, called Mountain Urtuu. Therefore, to ensure that this robot could
perform its task successfully, the programming algorithm in Figure 6 is designed before
actual programming is built and transfered to robot’s controller.
Figure 7: Programmed algorithm of the autonomous robot the MR2
The MR2 must receive the Gerege on its gripper before the robot can start to move
towards Mountain Urtuu. After the robot successfully receive the Gerege, it then searches
whether there is an uneven terrain or rope in its direction. If no obstacle is detected, the robot
moves towards Mountain Urtuu by following the directed line. The robot will try to cross
over the obstacle if it detects the uneven terrain or a rope in its walking direction.
3.0 DATA ANALYSIS
This the MR2 was designed in O configuration morphology of quadruped robot as
presented in [5]. Load torque and temperature tests were conducted to evaluate the robot
performance during locomotion. Table 3 summarizes the results of the evaluation test.
Table 3: AX-12A specification
Ready to walk During walk After walk
(2 minutes standby) (3 minutes walk) (1 minutes standby)
ID
Operating Temperature Operating Temperature Operating Temperature
Torque Range (°C) Torque Range (°C) Torque Range (°C)
10 6.25% 34 - 39 13.28% 43 - 44 6.25% 49 - 50
12 9.38% 34 - 45 14.84% 48 - 50 12.50% 50 -51
14 6.25% 34 - 39 4.39% 44 - 47 7.03% 51 - 52
310