
Page 311 - Robot Design Handbook ROBOCON Malaysia 2019
P. 311
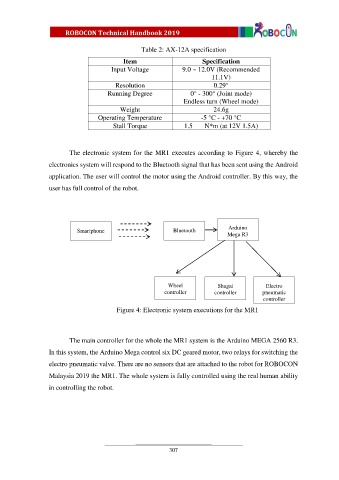
Table 2: AX-12A specification
Item Specification
Input Voltage 9.0 ~ 12.0V (Recommended
11.1V)
Resolution 0.29°
Running Degree 0° - 300° (Joint mode)
Endless turn (Wheel mode)
Weight 24.6g
Operating Temperature -5 °C - +70 °C
Stall Torque 1.5 N*m (at 12V 1.5A)
The electronic system for the MR1 executes according to Figure 4, whereby the
electronics system will respond to the Bluetooth signal that has been sent using the Android
application. The user will control the motor using the Android controller. By this way, the
user has full control of the robot.
Smartphone Bluetooth Arduino
Mega R3
Wheel Shagai Electro
controller controller pneumatic
controller
Figure 4: Electronic system executions for the MR1
The main controller for the whole the MR1 system is the Arduino MEGA 2560 R3.
In this system, the Arduino Mega control six DC geared motor, two relays for switching the
electro pneumatic valve. There are no sensors that are attached to the robot for ROBOCON
Malaysia 2019 the MR1. The whole system is fully controlled using the real human ability
in controlling the robot.
307