
Page 313 - Robot Design Handbook ROBOCON Malaysia 2019
P. 313
2.3 Software Design
2.3.1 Software Design for the MR1
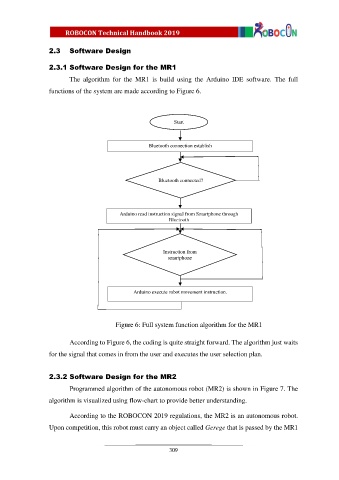
The algorithm for the MR1 is build using the Arduino IDE software. The full
functions of the system are made according to Figure 6.
Start
Bluetooth connection establish
Bluetooth connected?
Arduino read instruction signal from Smartphone through
Bluetooth
Instruction from
smartphone
Arduino execute robot movement instruction.
Figure 6: Full system function algorithm for the MR1
According to Figure 6, the coding is quite straight forward. The algorithm just waits
for the signal that comes in from the user and executes the user selection plan.
2.3.2 Software Design for the MR2
Programmed algorithm of the autonomous robot (MR2) is shown in Figure 7. The
algorithm is visualized using flow-chart to provide better understanding.
According to the ROBOCON 2019 regulations, the MR2 is an autonomous robot.
Upon competition, this robot must carry an object called Gerege that is passed by the MR1
309