
Page 62 - ผลงานวิจัยนวัตกรรม-มก.
P. 62
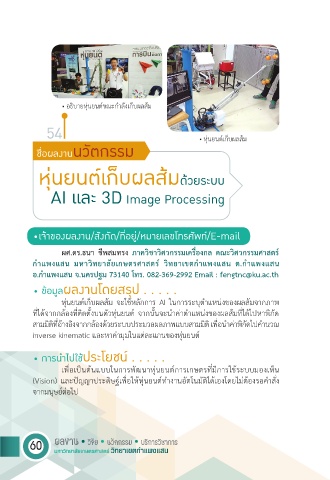
• อธิบายหุ่นยนต์ขณะก�าลังเก็บผลส้ม
54 • หุ่นยนต์เก็บผลส้ม
ชื่อผลงานนวัตกรรม
หุ่นยนต์เก็บผลส้มด้วยระบบ
AI และ 3D Image Processing
•เจ้าของผลงาน/สังกัด/ที่อยู่/หมายเลขโทรศัพท์/E-mail
ผศ.ดร.ธนา ชีพสมทรง ภาควิชาวิศวกรรมเครื่องกล คณะวิศวกรรมศาสตร์
ก�าแพงแสน มหาวิทยาลัยเกษตรศาสตร์ วิทยาเขตก�าแพงแสน ต.ก�าแพงแสน
อ.ก�าแพงแสน จ.นครปฐม 73140 โทร. 082-369-2992 Email : fengtnc@ku.ac.th
• ข้อมูลผลงานโดยสรุป . . . . .
หุ่นยนต์เก็บผลส้ม จะใช้หลักการ AI ในการระบุต�าแหน่งของผลส้มจากภาพ
ที่ได้จากกล้องที่ติดตั้งบนตัวหุ่นยนต์ จากนั้นจะน�าค่าต�าแหน่งของผลส้มที่ได้ไปหาพิกัด
สามมิติที่อ้างอิงจากกล้องด้วยระบบประมวลผลภาพแบบสามมิติ เพื่อน�าค่าพิกัดไปค�านวณ
inverse kinematic และหาค่ามุมในแต่ละแกนของหุ่นยนต์
• การน�าไปใช้ประโยชน์ . . . . .
เพื่อเป็นต้นแบบในการพัฒนาหุ่นยนต์การเกษตรที่มีการใช้ระบบมองเห็น
(Vision) และปัญญาประดิษฐ์เพื่อให้หุ่นยนต์ท�างานอัตโนมัติได้เองโดยไม่ต้องรอค�าสั่ง
จากมนุษย์ต่อไป
60 ผลงาน • วิจัย • นวัตกรรม • บริการวิชาการ