
Page 195 - Fisika Terapan for Engineers and Scientists
P. 195
13.1 Work, Energy, and Power in Rotational Motion; Torque 395
momentum of the gyroscope expressed in terms of its angular velocity?
(Example 8, page 406)
? The gyroscope is used like a compass, to establish a reference direction in space.
How does a gyroscope maintain a fixed reference direction? (Physics in Practice:
The Gyrocompass, page 414)
s we saw in Chapter 5, Newton’s Second Law is the equation that determines the
A translational motion of a body. In this chapter, we will derive an equation that
determines the rotational motion of a rigid body. Just as Newton’s equation of motion
gives us the translational acceleration and permits us to calculate the change in veloc-
ity and position, the analogous equation for rotational motion gives us the angular
acceleration and permits us to calculate the change in angular velocity and angular posi-
tion. The equation for rotational motion is not a new law of physics, distinct from
Newton’s three laws. Rather, it is a consequence of these laws.
13.1 WORK, ENERGY, AND POWER
IN ROTATIONAL MOTION; TORQUE
y Cosine of angle between
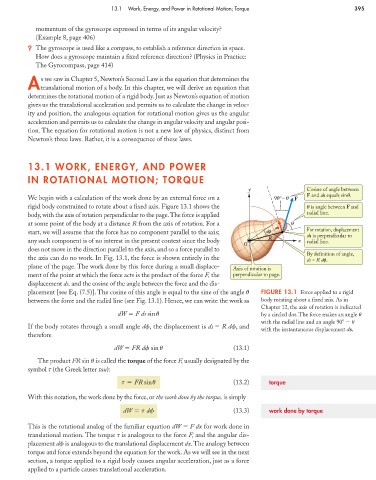
We begin with a calculation of the work done by an external force on a 90°– q F F and ds equals sinq.
rigid body constrained to rotate about a fixed axis. Figure 13.1 shows the q is angle between F and
body, with the axis of rotation perpendicular to the page.The force is applied radial line.
at some point of the body at a distance R from the axis of rotation. For a q
ds For rotation, displacement
start, we will assume that the force has no component parallel to the axis; df ds is perpendicular to
any such component is of no interest in the present context since the body R x radial line.
O
does not move in the direction parallel to the axis, and so a force parallel to
By definition of angle,
the axis can do no work. In Fig. 13.1, the force is shown entirely in the ds = R df.
plane of the page. The work done by this force during a small displace- Axis of rotation is
ment of the point at which the force acts is the product of the force F, the perpendicular to page.
displacement ds, and the cosine of the angle between the force and the dis-
placement [see Eq. (7.5)]. The cosine of this angle is equal to the sine of the angle FIGURE 13.1 Force applied to a rigid
between the force and the radial line (see Fig. 13.1). Hence, we can write the work as body rotating about a fixed axis. As in
Chapter 12, the axis of rotation is indicated
dW F ds sin by a circled dot. The force makes an angle
with the radial line and an angle 90
If the body rotates through a small angle d , the displacement is ds R d , and
with the instantaneous displacement ds.
therefore
dW FR d sin (13.1)
The product FR sin is called the torque of the force F, usually designated by the
symbol (the Greek letter tau):
t FR sin u (13.2) torque
With this notation, the work done by the force, or the work done by the torque, is simply
dW t df (13.3) work done by torque
This is the rotational analog of the familiar equation dW F dx for work done in
translational motion. The torque is analogous to the force F, and the angular dis-
placement d is analogous to the translational displacement dx.The analogy between
torque and force extends beyond the equation for the work. As we will see in the next
section, a torque applied to a rigid body causes angular acceleration, just as a force
applied to a particle causes translational acceleration.