
Page 115 - Robot Design Handbook ROBOCON Malaysia 2019
P. 115
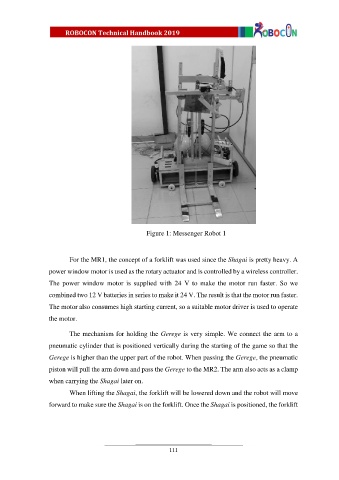
Figure 1: Messenger Robot 1
For the MR1, the concept of a forklift was used since the Shagai is pretty heavy. A
power window motor is used as the rotary actuator and is controlled by a wireless controller.
The power window motor is supplied with 24 V to make the motor run faster. So we
combined two 12 V batteries in series to make it 24 V. The result is that the motor run faster.
The motor also consumes high starting current, so a suitable motor driver is used to operate
the motor.
The mechanism for holding the Gerege is very simple. We connect the arm to a
pneumatic cylinder that is positioned vertically during the starting of the game so that the
Gerege is higher than the upper part of the robot. When passing the Gerege, the pneumatic
piston will pull the arm down and pass the Gerege to the MR2. The arm also acts as a clamp
when carrying the Shagai later on.
When lifting the Shagai, the forklift will be lowered down and the robot will move
forward to make sure the Shagai is on the forklift. Once the Shagai is positioned, the forklift
111