
Page 119 - Robot Design Handbook ROBOCON Malaysia 2019
P. 119
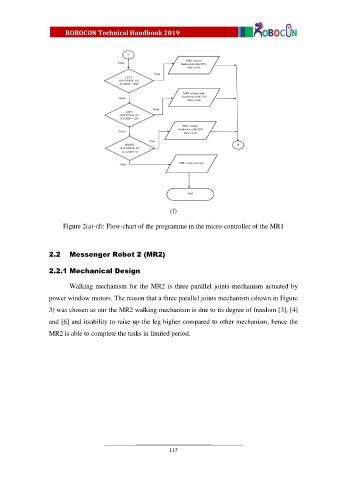
(f)
Figure 2(a)-(f): Flow-chart of the programme in the micro-controller of the MR1
2.2 Messenger Robot 2 (MR2)
2.2.1 Mechanical Design
Walking mechanism for the MR2 is three parallel joints mechanism actuated by
power window motors. The reason that a three parallel joints mechanism (shown in Figure
3) was chosen as our the MR2 walking mechanism is due to its degree of freedom [3], [4]
and [6] and itsability to raise up the leg higher compared to other mechanism, hence the
MR2 is able to complete the tasks in limited period.
115