
Page 120 - Robot Design Handbook ROBOCON Malaysia 2019
P. 120
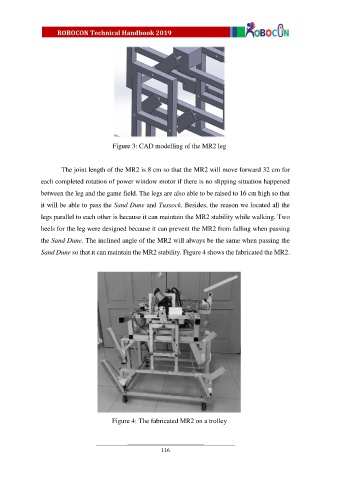
Figure 3: CAD modelling of the MR2 leg
The joint length of the MR2 is 8 cm so that the MR2 will move forward 32 cm for
each completed rotation of power window motor if there is no slipping situation happened
between the leg and the game field. The legs are also able to be raised to 16 cm high so that
it will be able to pass the Sand Dune and Tussock. Besides, the reason we located all the
legs parallel to each other is because it can maintain the MR2 stability while walking. Two
heels for the leg were designed because it can prevent the MR2 from falling when passing
the Sand Dune. The inclined angle of the MR2 will always be the same when passing the
Sand Dune so that it can maintain the MR2 stability. Figure 4 shows the fabricated the MR2.
Figure 4: The fabricated MR2 on a trolley
116