
Page 242 - Robot Design Handbook ROBOCON Malaysia 2019
P. 242
1. Cylinder for pneumatic hand
2. Pneumatic hand
3. Motor
4. Omni-wheel
5. Cylinder for the Shagai launcher
6. Cylinder for the Gerege clamper
Figure 4: A closer look at omni wheel
Figure 5: A closer look at clamper of the Gerege
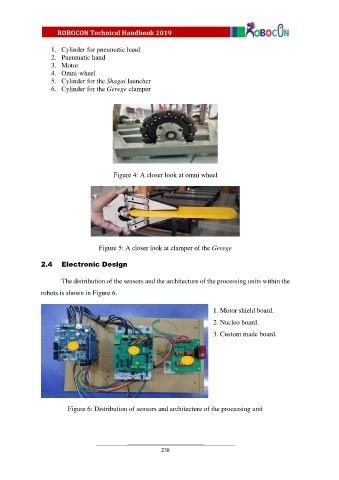
2.4 Electronic Design
The distribution of the sensors and the architecture of the processing units within the
robots is shown in Figure 6.
1. Motor shield board.
2. Nucleo board.
3. Custom made board.
Figure 6: Distribution of sensors and architecture of the processing unit
238