
Page 287 - Robot Design Handbook ROBOCON Malaysia 2019
P. 287
2.2 Autonomous Robot
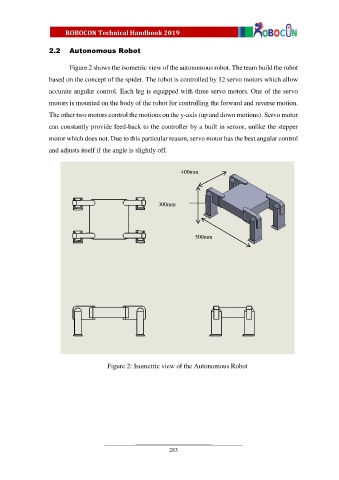
Figure 2 shows the isometric view of the autonomous robot. The team build the robot
based on the concept of the spider. The robot is controlled by 12 servo motors which allow
accurate angular control. Each leg is equipped with three servo motors. One of the servo
motors is mounted on the body of the robot for controlling the forward and reverse motion.
The other two motors control the motions on the y-axis (up and down motions). Servo motor
can constantly provide feed-back to the controller by a built in sensor, unlike the stepper
motor which does not. Due to this particular reason, servo motor has the best angular control
and adjusts itself if the angle is slightly off.
400mm
300mm
500mm
Figure 2: Isometric view of the Autonomous Robot
283