
Page 288 - Robot Design Handbook ROBOCON Malaysia 2019
P. 288
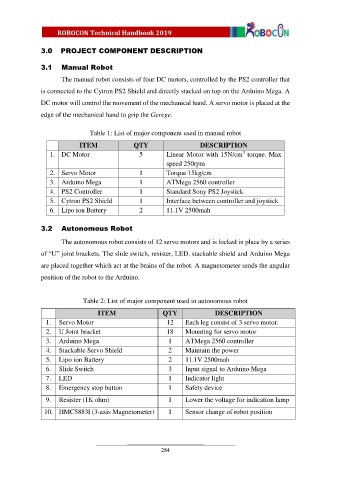
3.0 PROJECT COMPONENT DESCRIPTION
3.1 Manual Robot
The manual robot consists of four DC motors, controlled by the PS2 controller that
is connected to the Cytron PS2 Shield and directly stacked on top on the Arduino Mega. A
DC motor will control the movement of the mechanical hand. A servo motor is placed at the
edge of the mechanical hand to grip the Gerege.
Table 1: List of major component used in manual robot
ITEM QTY DESCRIPTION
3
1. DC Motor 5 Linear Motor with 15N/cm torque. Max
speed 250rpm
2. Servo Motor 1 Torque 15kg/cm
3. Arduino Mega 1 ATMega 2560 controller
4. PS2 Controller 1 Standard Sony PS2 Joystick
5. Cytron PS2 Shield 1 Interface between controller and joystick
6. Lipo ion Battery 2 11.1V 2500mah
3.2 Autonomous Robot
The autonomous robot consists of 12 servo motors and is locked in place by a series
of “U” joint brackets. The slide switch, resister, LED, stackable shield and Arduino Mega
are placed together which act at the brains of the robot. A magnetometer sends the angular
position of the robot to the Arduino.
Table 2: List of major component used in autonomous robot
ITEM QTY DESCRIPTION
1. Servo Motor 12 Each leg consist of 3 servo motor.
2. U Joint bracket 18 Mounting for servo motor
3. Arduino Mega 1 ATMega 2560 controller
4. Stackable Servo Shield 2 Maintain the power
5. Lipo ion Battery 2 11.1V 2500mah
6. Slide Switch 3 Input signal to Arduino Mega
7. LED 1 Indicator light
8. Emergency stop button 1 Safety device
9. Resister (1K ohm) 1 Lower the voltage for indication lamp
10. HMC5883l (3-axis Magnetometer) 1 Sensor change of robot position
284