
Page 308 - Robot Design Handbook ROBOCON Malaysia 2019
P. 308
2.1.1 Mechanical Design of the MR1
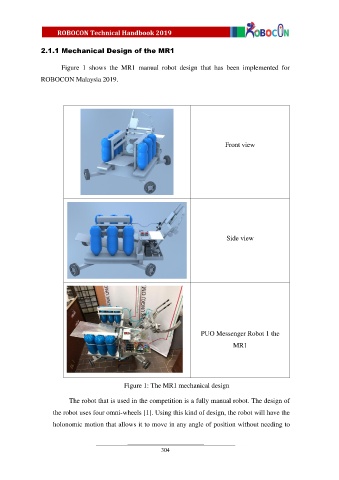
Figure 1 shows the MR1 manual robot design that has been implemented for
ROBOCON Malaysia 2019.
Front view
Side view
PUO Messenger Robot 1 the
MR1
Figure 1: The MR1 mechanical design
The robot that is used in the competition is a fully manual robot. The design of
the robot uses four omni-wheels [1]. Using this kind of design, the robot will have the
holonomic motion that allows it to move in any angle of position without needing to
304