
Page 46 - Robot Design Handbook ROBOCON Malaysia 2019
P. 46
hold the Gerege. From the head of the arm, there will be a gripper to hold the Gerege
followed by three servo motors to raise the Gerege.
In picking up and throwing the Shagai, two MG946 servo motor was attached to an
acrylic plane. After the Shagai was picked up, the piston in pneumatic system will push the
Shagai with the aid of an aluminium stick. Two bottles that contain gas were used for the
piston to push the Shagai and another two bottles were used for another two pistons to lift
the MR1 to a certain height in order to achieve the height that the Shagai will fall inside the
Landing Zone as shown in Figure 3. The pneumatic mechanisms that were used in both parts
will be separated into two independent pneumatic systems.
Table 2.0: The robots with their variables
Robot Variables Mass Locomotion Extremities DOF
the MR1 12kg Rotation 90° 2
the MR2 3kg Walking 40° 2
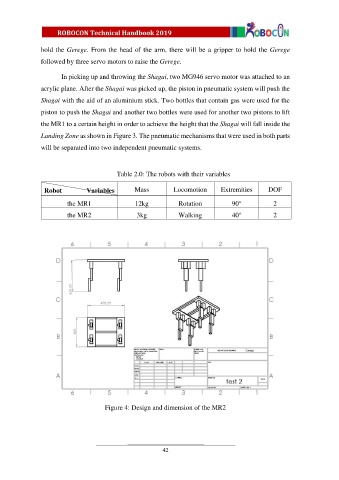
Figure 4: Design and dimension of the MR2
42