
Page 70 - Robot Design Handbook ROBOCON Malaysia 2019
P. 70
2.1.4 Leg Part of Messenger Robot 2 (MR2)
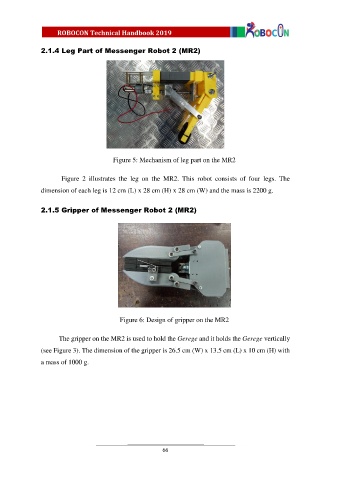
Figure 5: Mechanism of leg part on the MR2
Figure 2 illustrates the leg on the MR2. This robot consists of four legs. The
dimension of each leg is 12 cm (L) x 28 cm (H) x 28 cm (W) and the mass is 2200 g.
2.1.5 Gripper of Messenger Robot 2 (MR2)
Figure 6: Design of gripper on the MR2
The gripper on the MR2 is used to hold the Gerege and it holds the Gerege vertically
(see Figure 3). The dimension of the gripper is 26.5 cm (W) x 13.5 cm (L) x 10 cm (H) with
a mass of 1000 g.
66