
Page 68 - Robot Design Handbook ROBOCON Malaysia 2019
P. 68
Design is important to be finalized because it can affect the work progress. Second, the lack
of focus in individual tasks may lead to problem in time management.
The objective of the work is to deliver the Gerege from the MR1 to the MR2. Once
the Gerege has been delivered, the automatic robot will proceed along the Gobi Area
towards the Sand Dune and Tussock and then directly to Mountain Urtuu by walking on
four legs. Then the MR1 needs to throw the Shagai to earn 50 or more points. Once
achieved, the MR2 can climb the Mountain and raises the Gerege and the team will be the
winner which is called UUKHAI.
The motivation for us is to gain more experience in this field. By joining this
competition, it helps us to develop and even explore our potential in hardware and software
skills. This will also show to the society that even young people are capable of constructing
robot.
2.0 DETAILED DESIGN
2.1 Mechanical Design
The MR1 consists of three main components, which are base, Shagai throwing
mechanism and Shagai gripper mechanism. While the main components for the MR2 are
gripper and the leg part of the robot.
2.1.1 Base (Holonomic drive)
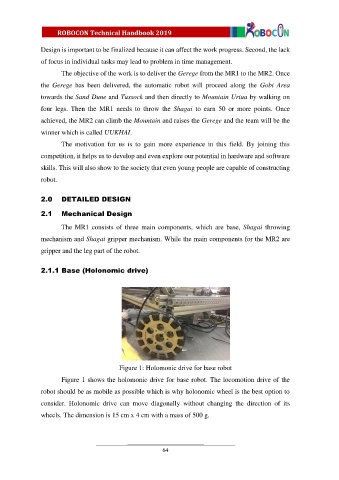
Figure 1: Holomonic drive for base robot
Figure 1 shows the holomonic drive for base robot. The locomotion drive of the
robot should be as mobile as possible which is why holonomic wheel is the best option to
consider. Holonomic drive can move diagonally without changing the direction of its
wheels. The dimension is 15 cm x 4 cm with a mass of 500 g.
64