
Page 11 - RPT PJ Y6 2019
P. 11
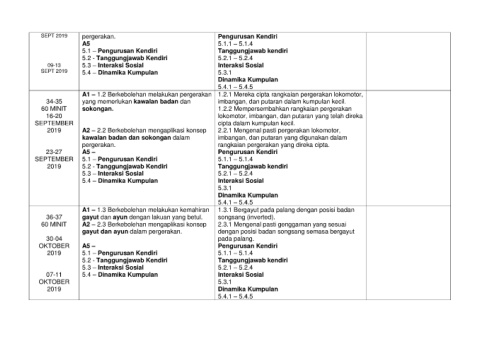
SEPT 2019 pergerakan. Pengurusan Kendiri
A5 5.1.1 – 5.1.4
5.1 – Pengurusan Kendiri Tanggungjawab kendiri
5.2 - Tanggungjawab Kendiri 5.2.1 – 5.2.4
09-13 5.3 – Interaksi Sosial Interaksi Sosial
SEPT 2019 5.4 – Dinamika Kumpulan 5.3.1
Dinamika Kumpulan
5.4.1 – 5.4.5
A1 – 1.2 Berkebolehan melakukan pergerakan 1.2.1 Mereka cipta rangkaian pergerakan lokomotor,
34-35 yang memerlukan kawalan badan dan imbangan, dan putaran dalam kumpulan kecil.
60 MINIT sokongan. 1.2.2 Mempersembahkan rangkaian pergerakan
16-20 lokomotor, imbangan, dan putaran yang telah direka
SEPTEMBER cipta dalam kumpulan kecil.
2019 A2 – 2.2 Berkebolehan mengaplikasi konsep 2.2.1 Mengenal pasti pergerakan lokomotor,
kawalan badan dan sokongan dalam imbangan, dan putaran yang digunakan dalam
pergerakan. rangkaian pergerakan yang direka cipta.
23-27 A5 – Pengurusan Kendiri
SEPTEMBER 5.1 – Pengurusan Kendiri 5.1.1 – 5.1.4
2019 5.2 - Tanggungjawab Kendiri Tanggungjawab kendiri
5.3 – Interaksi Sosial 5.2.1 – 5.2.4
5.4 – Dinamika Kumpulan Interaksi Sosial
5.3.1
Dinamika Kumpulan
5.4.1 – 5.4.5
A1 – 1.3 Berkebolehan melakukan kemahiran 1.3.1 Bergayut pada palang dengan posisi badan
36-37 gayut dan ayun dengan lakuan yang betul. songsang (inverted).
60 MINIT A2 – 2.3 Berkebolehan mengaplikasi konsep 2.3.1 Mengenal pasti genggaman yang sesuai
gayut dan ayun dalam pergerakan. dengan posisi badan songsang semasa bergayut
30-04 pada palang.
OKTOBER A5 – Pengurusan Kendiri
2019 5.1 – Pengurusan Kendiri 5.1.1 – 5.1.4
5.2 - Tanggungjawab Kendiri Tanggungjawab kendiri
5.3 – Interaksi Sosial 5.2.1 – 5.2.4
07-11 5.4 – Dinamika Kumpulan Interaksi Sosial
OKTOBER 5.3.1
2019 Dinamika Kumpulan
5.4.1 – 5.4.5