
Page 166 - Robot Design Handbook ROBOCON Malaysia 2019
P. 166
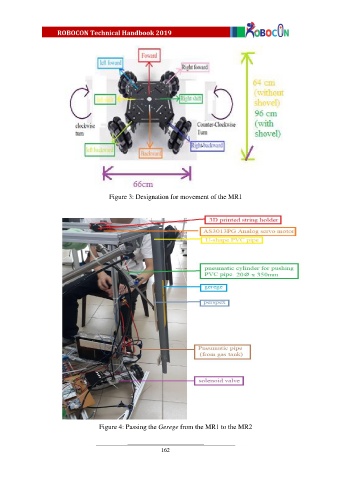
Figure 3: Designation for movement of the MR1
Figure 4: Passing the Gerege from the MR1 to the MR2
162