
Page 161 - Robot Design Handbook ROBOCON Malaysia 2019
P. 161
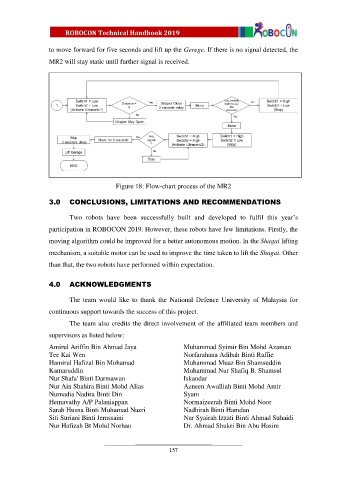
to move forward for five seconds and lift up the Gerege. If there is no signal detected, the
MR2 will stay static until further signal is received.
Figure 18: Flow-chart process of the MR2
3.0 CONCLUSIONS, LIMITATIONS AND RECOMMENDATIONS
Two robots have been successfully built and developed to fulfil this year’s
participation in ROBOCON 2019. However, these robots have few limitations. Firstly, the
moving algorithm could be improved for a better autonomous motion. In the Shagai lifting
mechanism, a suitable motor can be used to improve the time taken to lift the Shagai. Other
than that, the two robots have performed within expectation.
4.0 ACKNOWLEDGMENTS
The team would like to thank the National Defence University of Malaysia for
continuous support towards the success of this project.
The team also credits the direct involvement of the affiliated team members and
supervisors as listed below:
Amirul Ariffin Bin Ahmad Jaya Muhammad Syimir Bin Mohd Azaman
Tee Kai Wen Norfarahana Adibah Binti Raffie
Hamirul Hafizal Bin Mohamad Muhammad Muaz Bin Shamsuddin
Kamaruddin Muhammad Nur Shafiq B. Shamsul
Nur Shafa' Binti Darmawan Iskandar
Nur Ain Shahira Binti Mohd Alias Azneen Awalliah Binti Mohd Amir
Nurnadia Nadira Binti Din Syam
Hemavathy A/P Palaniappan Normaizeerah Binti Mohd Noor
Sarah Husna Binti Muhamad Nazri Nadhirah Binti Hamdan
Siti Suriani Binti Jemssaini Nur Syairah Izzati Binti Ahmad Suhaidi
Nur Hafizah Bt Mohd Norhan Dr. Ahmad Shukri Bin Abu Hasim
157