
Page 168 - Robot Design Handbook ROBOCON Malaysia 2019
P. 168
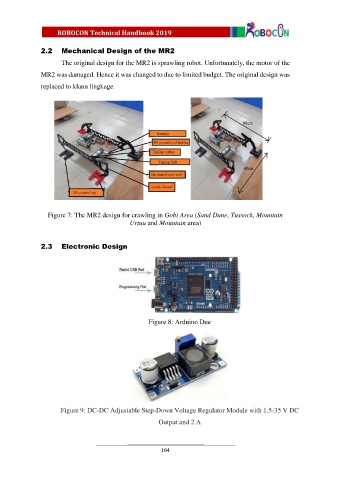
2.2 Mechanical Design of the MR2
The original design for the MR2 is sprawling robot. Unfortunately, the motor of the
MR2 was damaged. Hence it was changed to due to limited budget. The original design was
replaced to klann lingkage.
Figure 7: The MR2 design for crawling in Gobi Area (Sand Dune, Tussock, Mountain
Urtuu and Mountain area)
2.3 Electronic Design
Figure 8: Arduino Due
Figure 9: DC-DC Adjustable Step-Down Voltage Regulator Module with 1.5-35 V DC
Output and 2 A
164