
Page 215 - Robot Design Handbook ROBOCON Malaysia 2019
P. 215
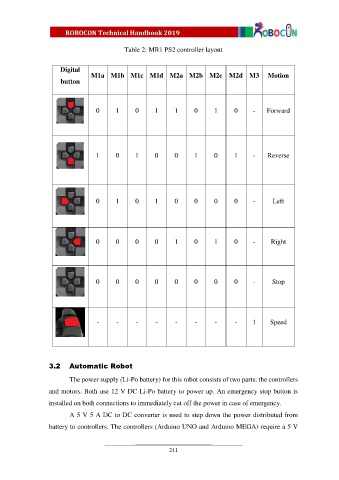
Table 2: MR1 PS2 controller layout
Digital
M1a M1b M1c M1d M2a M2b M2c M2d M3 Motion
button
0 1 0 1 1 0 1 0 - Forward
1 0 1 0 0 1 0 1 - Reverse
0 1 0 1 0 0 0 0 - Left
0 0 0 0 1 0 1 0 - Right
0 0 0 0 0 0 0 0 - Stop
- - - - - - - - 1 Speed
3.2 Automatic Robot
The power supply (Li-Po battery) for this robot consists of two parts: the controllers
and motors. Both use 12 V DC Li-Po battery to power up. An emergency stop button is
installed on both connections to immediately cut off the power in case of emergency.
A 5 V 5 A DC to DC converter is used to step down the power distributed from
battery to controllers. The controllers (Arduino UNO and Arduino MEGA) require a 5 V
211