
Page 225 - Robot Design Handbook ROBOCON Malaysia 2019
P. 225
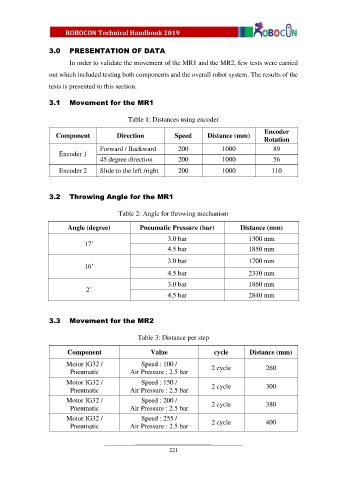
3.0 PRESENTATION OF DATA
In order to validate the movement of the MR1 and the MR2, few tests were carried
out which included testing both components and the overall robot system. The results of the
tests is presented in this section.
3.1 Movement for the MR1
Table 1: Distances using encoder
Encoder
Component Direction Speed Distance (mm)
Rotation
Forward / Backward 200 1000 89
Encoder 1
45 degree direction 200 1000 56
Encoder 2 Slide to the left /right 200 1000 110
3.2 Throwing Angle for the MR1
Table 2: Angle for throwing mechanism
Angle (degree) Pneumatic Pressure (bar) Distance (mm)
3.0 bar 1300 mm
17˚
4.5 bar 1850 mm
3.0 bar 1700 mm
10˚
4.5 bar 2330 mm
3.0 bar 1860 mm
2˚
4.5 bar 2840 mm
3.3 Movement for the MR2
Table 3: Distance per step
Component Value cycle Distance (mm)
Motor IG32 / Speed : 100 / 2 cycle 260
Pneumatic Air Pressure : 2.5 bar
Motor IG32 / Speed : 150 / 2 cycle 300
Pneumatic Air Pressure : 2.5 bar
Motor IG32 / Speed : 200 / 2 cycle 380
Pneumatic Air Pressure : 2.5 bar
Motor IG32 / Speed : 255 / 2 cycle 400
Pneumatic Air Pressure : 2.5 bar
221