
Page 35 - Robot Design Handbook ROBOCON Malaysia 2019
P. 35
the higher stress that is caused by the throwing mechanism above and the stresses induced
by the dc motors during motion. The upper portion of the robot is made of thinner square
piping, making the throwing mechanism lighter for the linear actuator to raise and for the
pneumatic cylinders to actuate.
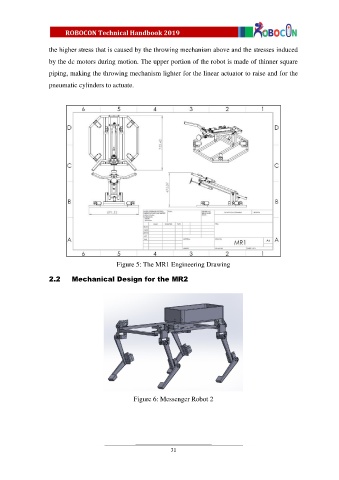
Figure 5: The MR1 Engineering Drawing
2.2 Mechanical Design for the MR2
Figure 6: Messenger Robot 2
31