
Page 40 - Robot Design Handbook ROBOCON Malaysia 2019
P. 40
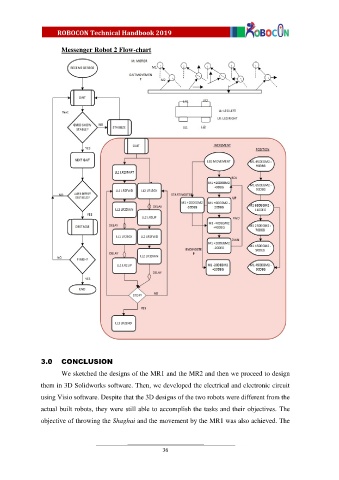
Messenger Robot 2 Flow-chart
Figure 11: Flowchart for the MR2
3.0 CONCLUSION
We sketched the designs of the MR1 and the MR2 and then we proceed to design
them in 3D Solidworks software. Then, we developed the electrical and electronic circuit
using Visio software. Despite that the 3D designs of the two robots were different from the
actual built robots, they were still able to accomplish the tasks and their objectives. The
objective of throwing the Shaghai and the movement by the MR1 was also achieved. The
36