
Page 55 - Robot Design Handbook ROBOCON Malaysia 2019
P. 55
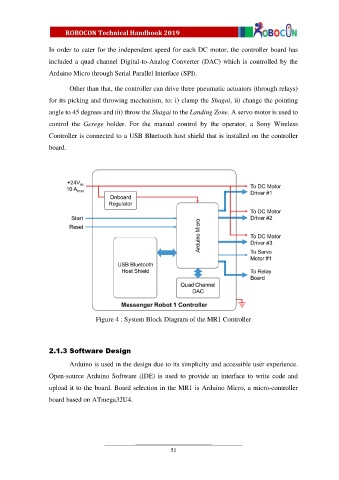
In order to cater for the independent speed for each DC motor, the controller board has
included a quad channel Digital-to-Analog Converter (DAC) which is controlled by the
Arduino Micro through Serial Parallel Interface (SPI).
Other than that, the controller can drive three pneumatic actuators (through relays)
for its picking and throwing mechanism, to: i) clamp the Shagai, ii) change the pointing
angle to 45 degrees and iii) throw the Shagai to the Landing Zone. A servo motor is used to
control the Gerege holder. For the manual control by the operator, a Sony Wireless
Controller is connected to a USB Bluetooth host shield that is installed on the controller
board.
Figure 4 : System Block Diagram of the MR1 Controller
2.1.3 Software Design
Arduino is used in the design due to its simplicity and accessible user experience.
Open-source Arduino Software (IDE) is used to provide an interface to write code and
upload it to the board. Board selection in the MR1 is Arduino Micro, a micro-controller
board based on ATmega32U4.
51