
Page 57 - Robot Design Handbook ROBOCON Malaysia 2019
P. 57
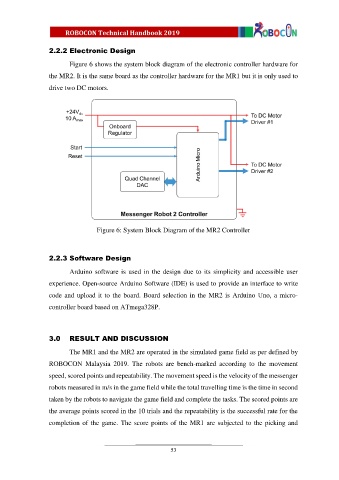
2.2.2 Electronic Design
Figure 6 shows the system block diagram of the electronic controller hardware for
the MR2. It is the same board as the controller hardware for the MR1 but it is only used to
drive two DC motors.
Figure 6: System Block Diagram of the MR2 Controller
2.2.3 Software Design
Arduino software is used in the design due to its simplicity and accessible user
experience. Open-source Arduino Software (IDE) is used to provide an interface to write
code and upload it to the board. Board selection in the MR2 is Arduino Uno, a micro-
controller board based on ATmega328P.
3.0 RESULT AND DISCUSSION
The MR1 and the MR2 are operated in the simulated game field as per defined by
ROBOCON Malaysia 2019. The robots are bench-marked according to the movement
speed, scored points and repeatability. The movement speed is the velocity of the messenger
robots measured in m/s in the game field while the total travelling time is the time in second
taken by the robots to navigate the game field and complete the tasks. The scored points are
the average points scored in the 10 trials and the repeatability is the successful rate for the
completion of the game. The score points of the MR1 are subjected to the picking and
53