
Page 106 - Installation Manual - GenII DTS
P. 106
14-Pin Data Harness
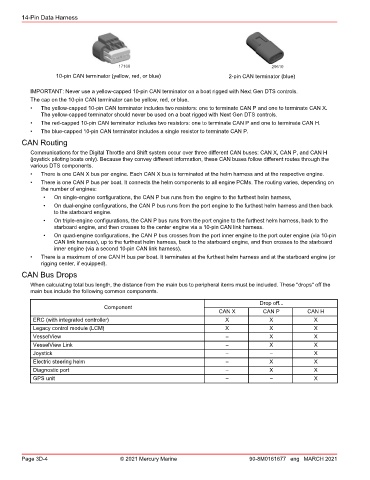
17168 29610
10-pin CAN terminator (yellow, red, or blue) 2-pin CAN terminator (blue)
IMPORTANT: Never use a yellow‑capped 10‑pin CAN terminator on a boat rigged with Next Gen DTS controls.
The cap on the 10‑pin CAN terminator can be yellow, red, or blue.
• The yellow‑capped 10‑pin CAN terminator includes two resistors: one to terminate CAN P and one to terminate CAN X.
The yellow‑capped terminator should never be used on a boat rigged with Next Gen DTS controls.
• The red‑capped 10‑pin CAN terminator includes two resistors: one to terminate CAN P and one to terminate CAN H.
• The blue‑capped 10‑pin CAN terminator includes a single resistor to terminate CAN P.
CAN Routing
Communications for the Digital Throttle and Shift system occur over three different CAN buses: CAN X, CAN P, and CAN H
(joystick piloting boats only). Because they convey different information, these CAN buses follow different routes through the
various DTS components.
• There is one CAN X bus per engine. Each CAN X bus is terminated at the helm harness and at the respective engine.
• There is one CAN P bus per boat. It connects the helm components to all engine PCMs. The routing varies, depending on
the number of engines:
• On single‑engine configurations, the CAN P bus runs from the engine to the furthest helm harness,
• On dual‑engine configurations, the CAN P bus runs from the port engine to the furthest helm harness and then back
to the starboard engine.
• On triple‑engine configurations, the CAN P bus runs from the port engine to the furthest helm harness, back to the
starboard engine, and then crosses to the center engine via a 10‑pin CAN link harness.
• On quad‑engine configurations, the CAN P bus crosses from the port inner engine to the port outer engine (via 10‑pin
CAN link harness), up to the furthest helm harness, back to the starboard engine, and then crosses to the starboard
inner engine (via a second 10‑pin CAN link harness).
• There is a maximum of one CAN H bus per boat. It terminates at the furthest helm harness and at the starboard engine (or
rigging center, if equipped).
CAN Bus Drops
When calculating total bus length, the distance from the main bus to peripheral items must be included. These "drops" off the
main bus include the following common components.
Drop off...
Component
CAN X CAN P CAN H
ERC (with integrated controller) X X X
Legacy control module (LCM) X X X
VesselView – X X
VesselView Link – X X
Joystick – – X
Electric steering helm – X X
Diagnostic port – X X
GPS unit – – X
Page 3D-4 © 2021 Mercury Marine 90-8M0161677 eng MARCH 2021