
Page 180 - Robot Design Handbook ROBOCON Malaysia 2019
P. 180
There are several mechanism designs developed for the MR1 and the MR2 to be
able to do the task given such as drive selection, lifting, expanding, gripping, throwing and
walking.
2.1.1 Messenger Robot 1
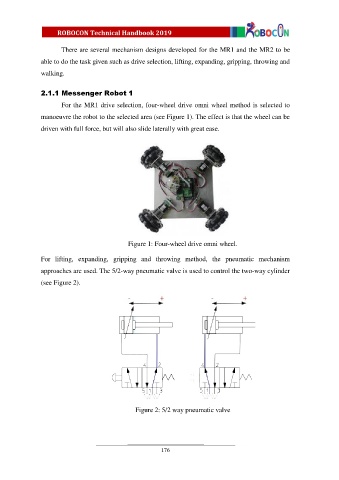
For the MR1 drive selection, four-wheel drive omni wheel method is selected to
manoeuvre the robot to the selected area (see Figure 1). The effect is that the wheel can be
driven with full force, but will also slide laterally with great ease.
Figure 1: Four-wheel drive omni wheel.
For lifting, expanding, gripping and throwing method, the pneumatic mechanism
approaches are used. The 5/2-way pneumatic valve is used to control the two-way cylinder
(see Figure 2).
Figure 2: 5/2 way pneumatic valve
176