
Page 185 - Robot Design Handbook ROBOCON Malaysia 2019
P. 185
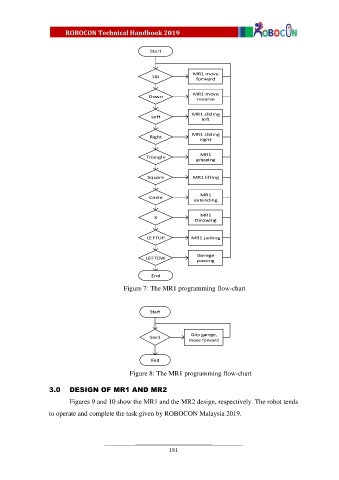
Start
MR1 move
Up
forward
MR1 move
Down
reverse
MR1 sliding
Left
left
MR1 sliding
Right
right
MR1
Triangle
gripping
Square MR1 lifting
MR1
Circle
extending
MR1
X
throwing
LEFTUP MR1 jacking
Gerege
LEFTDW
passing
End
Figure 7: The MR1 programming flow-chart
Start
Grip garege,
Sen1
move forward
End
Figure 8: The MR1 programming flow-chart
3.0 DESIGN OF MR1 AND MR2
Figures 9 and 10 show the MR1 and the MR2 design, respectively. The robot tends
to operate and complete the task given by ROBOCON Malaysia 2019.
181