
Page 189 - Robot Design Handbook ROBOCON Malaysia 2019
P. 189
Urtuu - Sharing the Knowledge. There will be two participating robots which are labelled
the MR1 (Manual robot) and the MR2 (Autonomous). Both of these robots will compete
with other participating teams in real time. The task of the manual robot is to pass the Gerege
[2] to autonomous robot after it has passed a few obstacles. The autonomous robot will then
proceed to cross over the bridge, while the manual robot will begin throwing the Shagai [3].
2.0 DETAILED DESIGN
2.1 Mechanical Design
The structure of both the MR1 and the MR2 robots are made by using long aluminum
plates and aluminum pipes as their supporting frame.
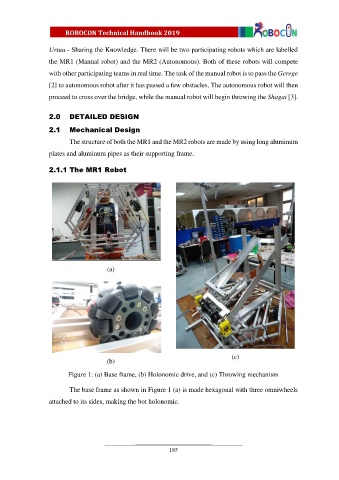
2.1.1 The MR1 Robot
(a)
(c)
(b)
Figure 1: (a) Base frame, (b) Holonomic drive, and (c) Throwing mechanism
The base frame as shown in Figure 1 (a) is made hexagonal with three omniwheels
attached to its sides, making the bot holonomic.
185