
Page 190 - Robot Design Handbook ROBOCON Malaysia 2019
P. 190
The holonomic drive, shown in Figure 1 (b), has a motion with three degrees of
freedom to enable the robot to shift from side to side and to move diagonally without
changing the direction of the wheels. This allows smooth motion of the robot, while the
hexagonal nature of the structure provides stable and rigid stand for the mounting of the
pick-up and the throwing mechanism system. There is also a short grip that holds the Gerege
to be passed on to the MR2 robot. A short pneumatic cylinder is hidden in the hollow
aluminium pipe which will hold and release the Gerege.
The throwing mechanism, as shown in Figure 1(c), consists of a long aluminium tray
holding the Shagai in place, with a pneumatic cylinder placed below, in line with the Shagai.
The pick-up mechanism is mounted on top of the throwing mechanism with a DC motor as
the pivot, so that it will first hold the Shagai and place it on the tray and then back up to its
initial position. The throwing mechanism will follow up by throwing the Shagai in the
desired direction.
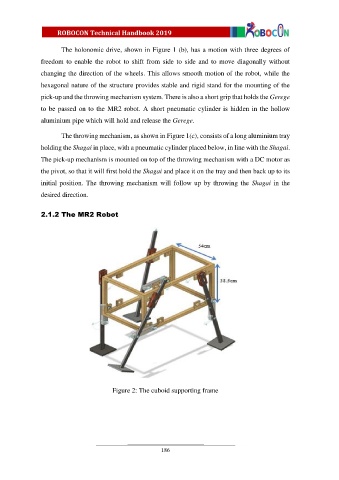
2.1.2 The MR2 Robot
Figure 2: The cuboid supporting frame
186