
Page 303 - Robot Design Handbook ROBOCON Malaysia 2019
P. 303
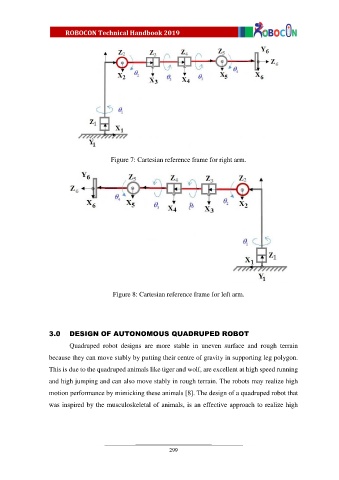
Figure 7: Cartesian reference frame for right arm.
Figure 8: Cartesian reference frame for left arm.
3.0 DESIGN OF AUTONOMOUS QUADRUPED ROBOT
Quadruped robot designs are more stable in uneven surface and rough terrain
because they can move stably by putting their centre of gravity in supporting leg polygon.
This is due to the quadruped animals like tiger and wolf, are excellent at high speed running
and high jumping and can also move stably in rough terrain. The robots may realize high
motion performance by mimicking these animals [8]. The design of a quadruped robot that
was inspired by the musculoskeletal of animals, is an effective approach to realize high
299