
Page 159 - Robot Design Handbook ROBOCON Malaysia 2019
P. 159
Arduino. The basic function of relay is to allow a low power control voltage operate a high
power switch, as the solenoid required 12 V to operate.
A linear actuator is used in the throwing mechanism of the Shagai in the MR1 as
shown in Figure 15 (c). This device requires 12 V to operate with 1000 N load capacity. The
full stroke of the linear actuator is 500 mm. The main advantage of using this device is that
it has high torque supply which is suitable for the weight of the gripper.
2.3 Software Design
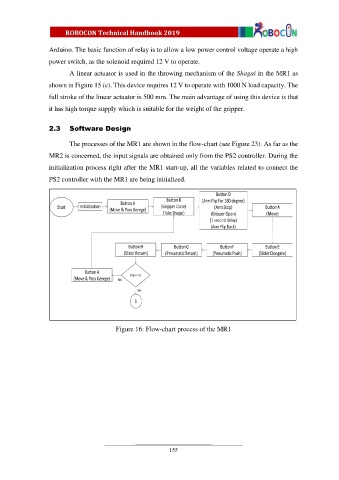
The processes of the MR1 are shown in the flow-chart (see Figure 23). As far as the
MR2 is concerned, the input signals are obtained only from the PS2 controller. During the
initialization process right after the MR1 start-up, all the variables related to connect the
PS2 controller with the MR1 are being initialized.
Figure 16: Flow-chart process of the MR1
155