
Page 160 - Robot Design Handbook ROBOCON Malaysia 2019
P. 160
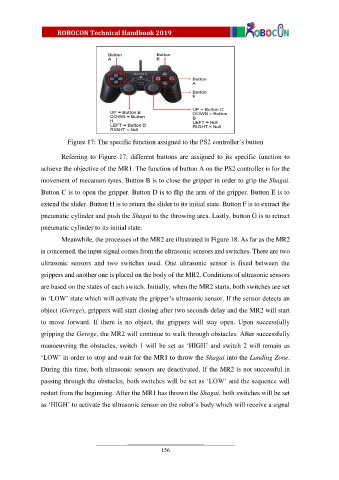
Figure 17: The specific function assigned to the PS2 controller’s button
Referring to Figure 17, different buttons are assigned to its specific function to
achieve the objective of the MR1. The function of button A on the PS2 controller is for the
movement of mecanum tyres. Button B is to close the gripper in order to grip the Shagai.
Button C is to open the gripper. Button D is to flip the arm of the gripper. Button E is to
extend the slider. Button H is to return the slider to its initial state. Button F is to extract the
pneumatic cylinder and push the Shagai to the throwing area. Lastly, button G is to retract
pneumatic cylinder to its initial state.
Meanwhile, the processes of the MR2 are illustrated in Figure 18. As far as the MR2
is concerned, the input signal comes from the ultrasonic sensors and switches. There are two
ultrasonic sensors and two switches used. One ultrasonic sensor is fixed between the
grippers and another one is placed on the body of the MR2. Conditions of ultrasonic sensors
are based on the states of each switch. Initially, when the MR2 starts, both switches are set
in ‘LOW’ state which will activate the gripper’s ultrasonic sensor. If the sensor detects an
object (Gerege), grippers will start closing after two seconds delay and the MR2 will start
to move forward. If there is no object, the grippers will stay open. Upon successfully
gripping the Gerege, the MR2 will continue to walk through obstacles. After successfully
manoeuvring the obstacles, switch 1 will be set as ‘HIGH’ and switch 2 will remain as
‘LOW’ in order to stop and wait for the MR1 to throw the Shagai into the Landing Zone.
During this time, both ultrasonic sensors are deactivated. If the MR2 is not successful in
passing through the obstacles, both switches will be set as ‘LOW’ and the sequence will
restart from the beginning. After the MR1 has thrown the Shagai, both switches will be set
as ‘HIGH’ to activate the ultrasonic sensor on the robot’s body which will receive a signal
156