
Page 158 - Robot Design Handbook ROBOCON Malaysia 2019
P. 158
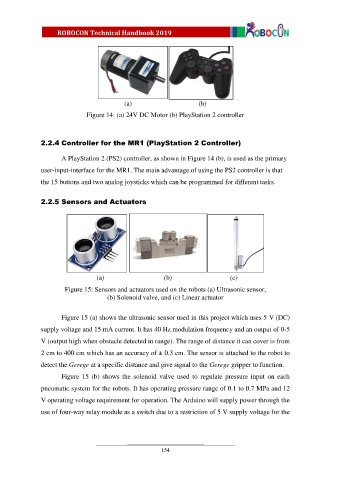
(a) (b)
Figure 14: (a) 24V DC Motor (b) PlayStation 2 controller
2.2.4 Controller for the MR1 (PlayStation 2 Controller)
A PlayStation 2 (PS2) controller, as shown in Figure 14 (b), is used as the primary
user-input-interface for the MR1. The main advantage of using the PS2 controller is that
the 15 buttons and two analog joysticks which can be programmed for different tasks.
2.2.5 Sensors and Actuators
(a) (b) (c)
Figure 15: Sensors and actuators used on the robots (a) Ultrasonic sensor,
(b) Solenoid valve, and (c) Linear actuator
Figure 15 (a) shows the ultrasonic sensor used in this project which uses 5 V (DC)
supply voltage and 15 mA current. It has 40 Hz modulation frequency and an output of 0-5
V (output high when obstacle detected in range). The range of distance it can cover is from
2 cm to 400 cm which has an accuracy of ± 0.3 cm. The sensor is attached to the robot to
detect the Gerege at a specific distance and give signal to the Gerege gripper to function.
Figure 15 (b) shows the solenoid valve used to regulate pressure input on each
pneumatic system for the robots. It has operating pressure range of 0.1 to 0.7 MPa and 12
V operating voltage requirement for operation. The Arduino will supply power through the
use of four-way relay module as a switch due to a restriction of 5 V supply voltage for the
154