
Page 18 - Robot Design Handbook ROBOCON Malaysia 2019
P. 18
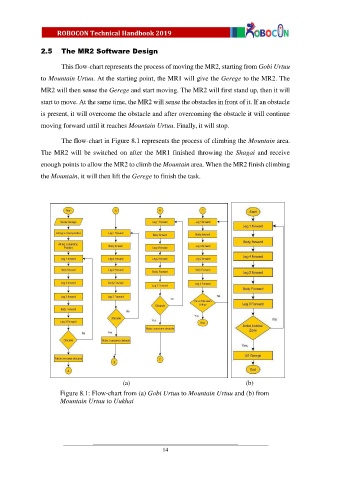
2.5 The MR2 Software Design
This flow-chart represents the process of moving the MR2, starting from Gobi Urtuu
to Mountain Urtuu. At the starting point, the MR1 will give the Gerege to the MR2. The
MR2 will then sense the Gerege and start moving. The MR2 will first stand up, then it will
start to move. At the same time, the MR2 will sense the obstacles in front of it. If an obstacle
is present, it will overcome the obstacle and after overcoming the obstacle it will continue
moving forward until it reaches Mountain Urtuu. Finally, it will stop.
The flow-chart in Figure 8.1 represents the process of climbing the Mountain area.
The MR2 will be switched on after the MR1 finished throwing the Shagai and receive
enough points to allow the MR2 to climb the Mountain area. When the MR2 finish climbing
the Mountain, it will then lift the Gerege to finish the task.
(a) (b)
Figure 8.1: Flow-chart from (a) Gobi Urtuu to Mountain Urtuu and (b) from
Mountain Urtuu to Uukhai
14