
Page 80 - Robot Design Handbook ROBOCON Malaysia 2019
P. 80
The MR2 is driven by a power window motor with a connector that connects to the
legs. The connector produces a circular motion to create a circle, thus ensuring thatthe legs
can move forward. In order to ensure the MR2 can pass through the Sand Dune and Tussock,
there is a slope design at the leg to facilitate the movement of the robot. The weight of the
MR2 including its body parts and legs is 15 kg.
2.2 Electronic Design
2.2.1 Messenger Robot 1 (MR1)
Joystick Arduino 1 Master To
Shield Bluetooth Receiver
Motor Slave From
2 Robot Tyre
Driver 1 Bluetooth Transmitter
Arduino 2
Motor
2 Robot Tyre Driver 2
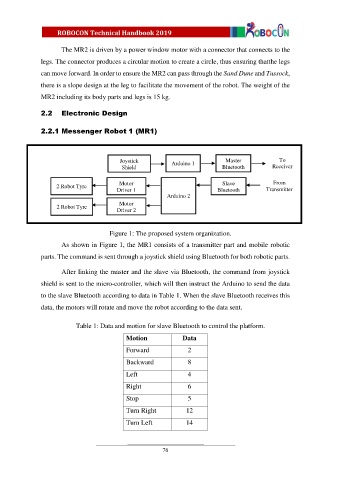
Figure 1: The proposed system organization.
As shown in Figure 1, the MR1 consists of a transmitter part and mobile robotic
parts. The command is sent through a joystick shield using Bluetooth for both robotic parts.
After linking the master and the slave via Bluetooth, the command from joystick
shield is sent to the micro-controller, which will then instruct the Arduino to send the data
to the slave Bluetooth according to data in Table 1. When the slave Bluetooth receives this
data, the motors will rotate and move the robot according to the data sent.
Table 1: Data and motion for slave Bluetooth to control the platform.
Motion Data
Forward 2
Backward 8
Left 4
Right 6
Stop 5
Turn Right 12
Turn Left 14
76