
Page 302 - Robot Design Handbook ROBOCON Malaysia 2019
P. 302
= ( ̈ − ̈ ) + ( ̇ − ̇ ) + ( − ) (1)
0
0
0
where x0 is nominal robot position, x is the actual one, Mt, Bt and Kt are target mass, damping
and stiffness, respectively, F is the external force exerted upon the robot. The robust
interaction-control approach [7] considers a simplified interaction model of an impedance
controlled robot.
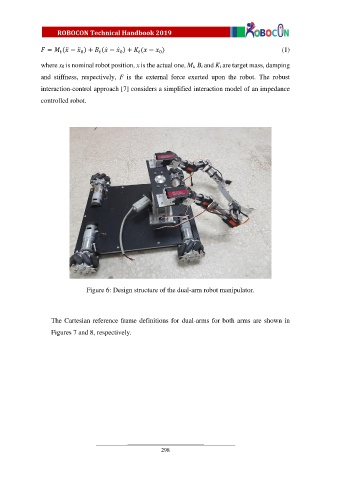
Figure 6: Design structure of the dual-arm robot manipulator.
The Cartesian reference frame definitions for dual-arms for both arms are shown in
Figures 7 and 8, respectively.
298