
Page 691 - 3DS MAX 2015 احترف
P. 691
الفصل40 :
إن الشريحة الأولى في اللوحة Motionبعد الشريحة Assign Controllerھي الشريحة .IK Solver
باستخدام ھذه الشريحة ،يمكننا اختيار التبديل بين الحلين .HI IK solver and IK Limb solver :يسمح لنا الزر
Enabledبتعطيل الحل .بتعطيل Disablingالحل ،يمكننا استخدام التحريك الأمامي Forward Kinematics
لتحريك الكائنات .للعودة إلى الحل ،IK solutionالنقر ببساطة علة الزر Enabledمرة ثانية .إن الخيار IK for FK
Poseيفعل المتحكم IK controlحتى لو كان الحل IK Solverمع ّطل .يسمح لنا ذلك بمعالجة Manipulateتسلسلية
Hierarchyالكائنات التي تستخدم التحريك الأمامي FKبينما ما زالت تعمل مع الحل .IK solutionإذا تم تعطيل
الزران ،IK for FK Pose and the Enabled :يمكن أن يتحرك الھدف بدون التأثير على تسلسلية الكائنات.
إذا تحرك الھدف بعيداً عن الارتباط النھائي ،فإن النقر على الزر IK/FK Snapيحرك الھدف تلقائياً ليطابق
موضع الارتباطات .يحافظ الخيار Auto Snapتلقائياً على الھدف والارتباط مع بعضھما البعض .يتذكر الزر Set as
Preferred Angleزوايا النظام .IK systemيمكن استدعاء ھذه الزوايا ثانية في أي وقت باستخدام الزر Assume
.Preferred Angleإذا أردنا تغيير كائني عظمة البداية والنھاية ،يمكننا النقر على أحد الزرينPick Start Joint :
or Pick End Jointواختيار عظم جديد.
ملاحظة :إن أفضل طريقة لتحديد كائن ما باستخدام أحد الزرين ،Pick Start Joint or Pick End Joint :ھي بفتح
صندوق الحوار ) ،Select by Name (Hحيث يمكننا تحديد الكائن بالضبط.
تحذير :إذا حددنا ابناً Childكوصلة بداية Start Jointوكائناً فوق الابن كوصلة نھاية ،فلن يؤثر تحريك الھدف على
السلسلة .IK Chain
تتضمن الشريحة IK Solver Propertiesالقيمة .Swivel Angleتعرف ھذه القيمة زاوية الدوران
المستوي الذي يتضمن كائنات الوصلة والخط الذي يصل وصلتي البداية والنھاية .إن ھذا المستوي أساسي لأنه يعرف اتجاه
تحرك الوصلة عند ثنيھا .إذا تم تحديد السلسلة ،IK Chainيمكننا أن نعرض ونعالج زاوية الدوران بتفعيل الزر Select
and Manipulateفي شريط الأدوات الرئيسي .بانتقال متحكم زاوية الدوران ،يمكننا وضع الاتجاه الذي فيه انحناء
السلسلة كما يتحرك مؤثر النھاية .End Effectorعلى سبيل المثال ،يمكن للركبة Kneeأن تقرر النقطة الخارجية
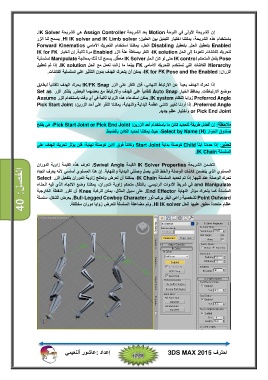
Point Outwardلشخصية راعي البقر يركب ثور .Bull-Legged Cowboy Characterيعرض الشكل ،سلسلة
عظام متعددة مطبق عليھا الحل .HI IK solverوتم مضاعفة السلسلة لتعرض زوايا دوران مختلفة.
إعداد :عاشور ألنعيمي احترف 3DS MAX 2015
